German Congress of Orthopaedics and Traumatology (DKOU 2025)
Vollständig endoskopische, roboterassistierte Technik für Plattenosteosynthesen am vorderen Beckenring und Acetabulum – eine Machbarkeitsstudie
Text
Zielsetzung und Fragestellung: Die plattenosteosynthetische Stabilisierung von Beckenring- und Acetabulumfrakturen erfordert in der Regel offene, invasive Operationszugänge, die mit einem relevanten Komplikationsrisiko einhergehen. In jüngster Zeit haben mehrere Forschungsgruppen bereits die Machbarkeit von vollständig endoskopischen Operationen zur Plattenosteosynthese am Becken demonstriert. Roboterassistierte, endoskopische Verfahren konnten bereits in der Viszeralchirurgie hervorragende Ergebnisse im Vergleich zur klassischen Endoskopie erzielen. Um die Vorteile der roboterassistierten Endoskopie (hohe Präzision, mehr Freiheitsgrade der Instrumente und vergrößernde 3D-Visualisierung) auch für endoskopische Plattenosteosynthesen am Becken zu übertragen, war das Ziel, die Durchführbarkeit einer roboterassistierten, endoskopischen, präperitonealen Technik für Plattenosteosynthesen am vorderen Beckenring und am Acetabulum mit einem standardisierten Protokoll zu untersuchen.
Material und Methoden: Im Rahmen dieser Machbarkeitsstudie wurden zunächst vier verschiedene Plattenosteosynthesen (Platte für den oberen Schambeinast, suprapectineale Platte, infrapectineale Platte und Platte für den hinteren Acetabulumpfeiler), die üblicherweise über einen invasiven Stoppa-Zugang eingebracht werden, mittels des modularen Roboterassistenzsystems Hugo™ RAS endoskopisch jeweils an zehn synthetischen Beckenmodellen durchgeführt. Anschließend wurde an zehn Körperspendern während der Präparation für die vier Plattenosteosynthesen zunächst das Identifizieren von zehn typischen anatomischen Landmarken, die über herkömmliche Zugangswege visualisiert werden können, überprüft. Nachfolgend wurden die vier verschiedenen Plattenosteosynthesen ebenfalls in präperitonealer, endoskopischer, roboterassistierter Technik bei den zehn Körperspendern durchgeführt. Bei beiden Versuchen wurden jeweils der Erfolg, die Anzahl der Fehlbohrungen und die Zeit für die jeweiligen Plattenosteosynthesen als Lernkurven ausgewertet.
Ergebnisse: Am synthetischen Beckenmodell konnten die vier Plattenosteosynthesen mit einer steilen Lernkurve durchgeführt werden. Dabei konnte die Anzahl der Fehlbohrungen und die Zeit für die jeweiligen Plattenosteosynthesen (z.B. von 48 Minuten auf 21 Minuten für die suprapectineale Platte) deutlich reduziert werden. Auch an den humanen Körperspender konnte die Durchführbarkeit aller vier Plattenosteosynthesen für den vorderen Beckenring und das Acetabulum mit der endoskopischen, roboterassistierten Technik demonstriert werden (Abbildung 1 [Fig. 1]). Es konnte sowohl für das Identifizieren der zehn anatomischen Landmarken als auch für die Fehlbohrungen und die Zeit für die vier Plattenosteosynthesen eine steile Lernkurve nachgewiesen werden.
Abbildung 1: Machbarkeitsstudie zur roboterassistierten, endoskopischen Technik für Plattenosteosynthesen am vorderen Beckenring und Acetabulum. Versuchssetup für das synthetische Beckenmodell (A) und operatives Setup am Körperspender (B) sowie intraoperative fluoroskopische Bilder einer Platte für den oberen Schambeinast und einer infrapectinealen Platte (C). 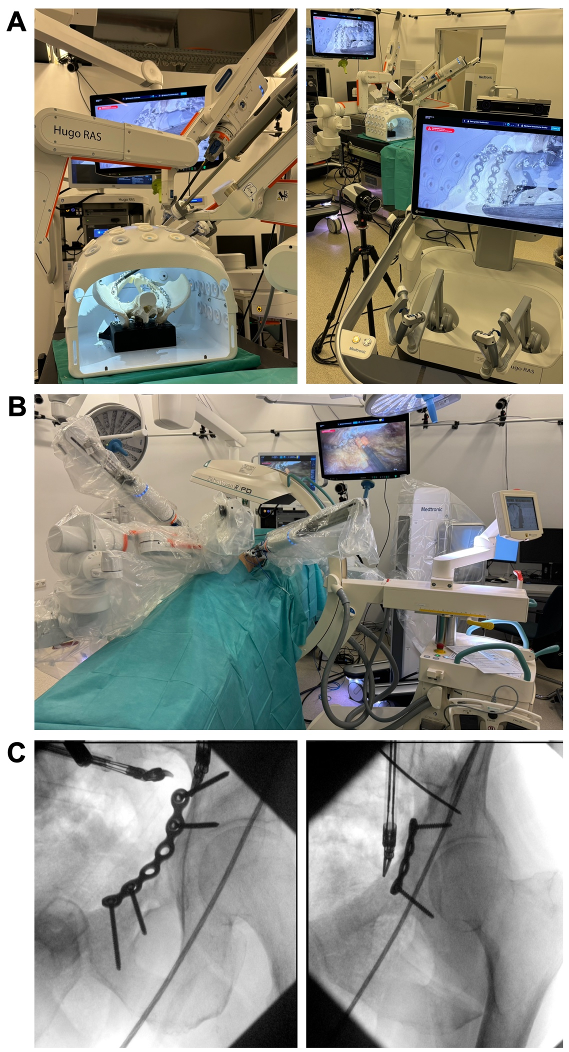
Diskussion und Schlussfolgerung: Plattenosteosynthesen am vorderen Beckenring und am Acetabulum, die üblicherweise über einen Stoppa-Zugang eingebracht werden, sind auch in roboterassistierter, endoskopischer, präperitonealer Technik realisierbar.

