PREMUS 2025: 12th International Scientific Conference on the Prevention of Work-Related Musculoskeletal Disorders
Force-estimating insoles as a mobile solution for measuring ground reaction forces and center of pressure in occupational tasks
Text
Introduction: Accurate measurement of ground reaction forces (GRFs) and center of pressure (CoP) is critical for using bottom-up inverse dynamics to assess biomechanical loads in occupational settings. While force plates are the lab standard, their use in dynamic field environments is impractical. As a result, ergonomic assessments often rely on simplified tools that overlook movement dynamics and the cumulative loads experienced by workers. Force insoles are an emerging technology that offer a portable alternative for collecting GRFs and CoP in-field, but their validity for measuring kinetics during occupational tasks has yet to be established. Additionally, a reliable CoP estimation method is needed for applying GRFs in inverse dynamics calculations. This study aimed to establish the validity of using force insoles to measure vertical GRFs and CoP during simulated work tasks. The objectives were to
- develop a CoP estimation method for 3-compartment force insoles,
- develop a drift correction method, and
- examine the relationship between vertical GRFs and CoP measured by in-ground force plates and the force insoles, across four work tasks.
Methods: Thirty-nine subjects (19F, 20M) completed floor-to-shoulder lifting (5.7 kg), box packaging (0.11 kg), palletizing (5.7 kg), and above shoulder work while wearing force insoles and standing on in-ground force plates. Subject kinematics were tracked with a Qualisys motion capture system and processed through Theia3D. The insoles measured forces at three regions on the foot (medial forefoot, lateral forefoot, and heel), and a novel weighted algorithm was created to estimate CoP based on the different region's force distribution. A field-ready approach was also developed and implemented to reduce sensor drift-related errors. The resulting CoP and vertical GRF data were compared to the force plate-derived measures using Pearson’s correlations and root mean squared errors (RMSEs).
Results: Insole-derived vertical GRFs closely aligned with force plate vertical GRFs, showing strong correlations (0.77-0.99) and an average RMSE of 26.8N after adjusting for sensor drift. The novel weighted algorithm to estimate CoP produced moderate to high correlations, with RMSEs ranging from 1.7-3.4 cm depending on the task (exemplar data in Figure 1 [Fig. 1]).
Figure 1: Example anteroposterior (A) and medial-lateral (B) CoP of force plates and insoles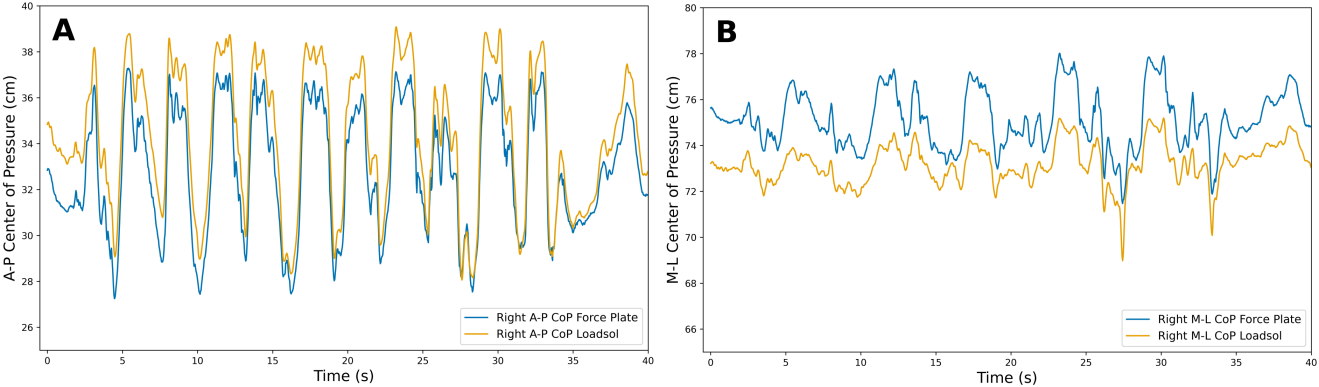
Discussion: With moderate to strong agreement between insoles and force plates for both drift-corrected vertical GRFs and weighted algorithm-derived CoP, these findings are promising for the potential use of insoles for field-based kinetic assessments. By addressing key gaps such as sensor drift and CoP estimation, this method may provide a practical alternative in environments where traditional force plates are not feasible.
Conclusion: Force insoles, when paired with a weighted CoP algorithm and drift correction, may offer a viable field-ready solution for measuring kinetics during occupational tasks. These advancements may enable the collection of time-series kinetic data that can be used in inverse dynamics models, providing more accurate estimates of the accumulated loads experienced by workers throughout their shift.

